|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese|
라디오 전자 및 전기 공학의 백과사전 전자 낚싯대 기계. 무선 전자 및 전기 공학 백과사전
무선 전자 및 전기 공학 백과사전 / 가정, 가정, 취미 사람이 "자신의"것으로 간주하는 데 익숙한 일부 기능을 전자 장비로 이전하려는 가장 소심한 시도조차도 그에 따라 대체 불가능하며 자신에 대한 경계심을 유발합니다. 마지막으로 이것은 가장 보수적인 형태의 인간 취미 중 하나인 아마추어 낚시에 적용됩니다. 라디오 아마추어 디자이너에게 더 흥미로운 활동을 상상하기는 어렵지만. 여기에서 발생하는 문제의 공식화부터 "직관의 알고리즘화"에서 발명 테스트에 이르기까지. 그리고 최근에 우리가 급히 전화를 받았던 가상 공간이 아니라 바로 현재에 있습니다. 푸른 하늘 아래, 숲과 초원 사이, 물이 튀는 물과 바코드가없는 물고기가 있습니다.
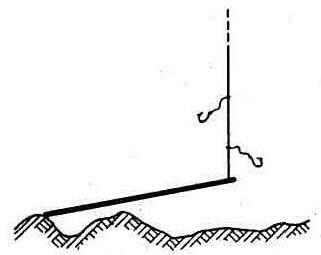
어려운 낚시 조건에서 물고기를 자동으로 걸기 위해 설계된 장치의 운동학 다이어그램이 그림 1에 나와 있습니다. 여기: 1 - 기계의 전체 전자 기계 "채우기"를 수용하는 하우징; 2 - 플랫 스프링, 기계의 주요 발동기; b - 낚싯줄(7)의 클립(11)이 있는 스프링 장착 로커, 브래킷(4)으로 형성되고 절연판(3)에 장착된 접촉 쌍; 8 - 후크 귀걸이 9로 추력; 10 - 끝에 MZ 나사산이 있는 기어박스 샤프트; 12 - 기계를 선상에 고정하기 위한 클램프 또는 보트의 선미 트랜섬. 코킹 상태에서 기계는 기어 박스의 샤프트 10과 이어링 9의 커플 링에 의해 고정됩니다. 스위치가 켜진 엔진은 로터의 몇 회전으로 즉시이 커플 링을 분리 할 수 있습니다. 그러나 이것이 일어날 시점 - 기계의 전자 장치가 결정할 것입니다. 작업 알고리즘은 간단합니다. 로커 6이 브래킷 4에 닿는 순간 발생하는 센서의 첫 번째 전기 신호는 기계를 활성 상태로 전환합니다. 이 자동 장치의 활성 상태(지속 시간이 설정됨)에서 총 수(간섭 및 물림 모두)가 특정 숫자 N(또한 설정됨)에 도달하지 않으면 자동 장치는 다시 초기 상태인 대기 상태를 취합니다. 이 숫자에 도달하면 전기 모터가 켜지고 연결됩니다. 이 알고리즘은 기계의 전자 "채우기"에 의해 구현되며 그 개략도는 그림에 나와 있습니다. 2. 여기: SF1 - 접촉 쌍 "로커 브래킷" - 시스템 센서; SF2 - 접촉 쌍 "감속기 귀고리의 샤프트"(감속기와 전기 모터는 기본 절연체에 배치됨); SA1 - 토글 스위치, 접점 SA1.2가 열리면 기계가 설정될 때 기계의 전원 부분에 전원이 공급되지 않고 미끼가 변경됩니다. SA2 - "바이트" 수를 설정하는 스위치 - N О{2,3,4}; SA3 - 활성 시간 간격(초) 동안 전환 - T О{2, 4, 8}.
요소 DD1.1, DD1.2, C2, R4는 SF3 센서 접점의 "바운스"에서 DD1("물린" 카운터)의 잘못된 카운트를 제거하는 단일 진동기를 구성합니다. DD2.2, DD2.3 요소에는 1Hz의 주파수에 따라 클록 펄스 발생기가 조립됩니다. 이 펄스를 합산하는 카운터 DD4는 기계의 활성 상태 시간을 설정합니다. 카운터를 재설정하고 기계를 원래 상태(대기 상태)로 되돌리는 작업은 요소 DD2.1 및 DD1.3에서 생성되는 "단일" 진폭의 펄스에 의해 수행됩니다. 이것은 활성 시간이 끝날 때(SA3 스위치 엔진에 높은 수준의 전압이 나타날 때) 또는 절단 시작 시(SF2 접점이 끊어질 때) 또는 수동으로 기계를 끌 때 발생합니다. SA1 토글 스위치 - SA1.1 접점 쌍 닫기. 요소 DD2.4, DD1.4 및 트랜지스터 VT3, VT4에는 다이나믹 헤드 HA2을 자극하여 낚시꾼에게 기계 전환에 대한 신호를 보내는 제어되는 (입력 2.4 요소 DD1에 의해) 톤 제너레이터가 조립됩니다. 활성 상태로. 트랜지스터 VT1 및 VT2 - 전기 모터 M1을 제어하는 전자 키. LC 필터의 인덕터 L1은 페라이트로 만든 환형 자기 회로(외경 - 10 ... 12mm)에 m=1000...2000. 권선에는 와이어 PEV-50 100...2의 0.2...0.3권이 포함됩니다. 평평한 동력 스프링(그림 2의 1) - 기계의 주요 이동자 - 0,8mm 두께의 인청동 스트립으로 만들어집니다. 너비는 78이고 길이(매립된 끝 제외)는 220mm입니다. 절단 중 스프링에 의해 생성된 초기 힘은 1,3kg, "최대" - 최대 750mm입니다. 매듭 7 - 낚싯줄 통과용 구멍이 있는 일반 터미널입니다. 접촉 브래킷의 치수는 중요하지 않으며 접촉 패드와 그 사이에서 이동하는 로커 암의 끝 사이에 최소 - 1, 최대 - 10mm의 필요한 간격을 설정할 수 있다는 점만 중요합니다. 브래킷의 접점과 관련된 로커의 위치는 노드 5의 스프링을 장력을 가하거나 풀어서 변경할 수 있습니다. 이러한 모든 요소의 전체 기계적 강도는 물고기를 "고정"하기 때문에 충분히 높아야 합니다. 어쨌든 그들은 결과없이 10 ~ 15kg의 저크와 타격을 견뎌야합니다. 로커가 흔들리는 나사 축은 최소한의 저항을 제공해야 합니다. 충분히 두꺼운 (8 ... 10 mm) 시트 유기 유리 또는 패치 뚜껑이있는 상자 형태의 고 충격 폴리스티렌으로 접착 된 케이스에 기계의 트리거 장치 및 부품 배치가 그림에 나와 있습니다. 3, 가. 전기 모터 1 - 예를 들어 축에 직경이 7 ... 5이고 길이가 6mm 이상인 작은 기어 5이있는 전기 장난감의 모든 소형 저전력 (대형 기어 4는 귀걸이에서 나사를 풀고 자유롭게 움직입니다). 전기 모터를 설치하기 전에 로터 권선의 절연 품질을 확인해야 합니다. 누설 저항은 1MΩ 이상이어야 합니다. XNUMX~XNUMX배 감속을 제공하는 적합한 대형 기어 기어는 동일한 장난감에서 찾을 수 있습니다. 트리거의 기타 세부 정보: 6 - 기어박스 샤프트(강철); 2차 내부 지지대(본체의 "하단"에 부착됨); 3- 샤프트의 부드러운 플랫 스프링으로 밀어냅니다. 5 - 하우징 벽에 눌러진 청동 또는 황동 베어링. 스프링 장력이 있는 기어 샤프트 커플링 귀걸이는 그림에 표시된 변형에 따라 만들 수 있습니다. 3b. 이 경우 하우징 커버에 직경 약 25mm의 구멍을 만들어야합니다 (그림 1의 위치는 화살표 A로 표시됨).이 구멍을 통해 기어 박스의 큰 기어를 손가락으로 회전시켜 샤프트의 끝이 귀걸이에 나사로 고정되어 있습니다. 이것은 매우 높은 신뢰성의 장애이며 거의 모든 외부 영향을 받지 않습니다. 다른 옵션 (그림 3, c)에 따르면 타원형 구멍의 하단에만 보존되는 나사산 인 귀걸이는 단순히 하우징에서 튀어 나온 기어 박스 샤프트의 끝 부분에 던져집니다.
언더컷은 SA1 스위치 엔진에서 공급 전압에 가까운 전압인 "2"이 나타나는 것으로 시작됩니다. 이 전압은 카운터 DD3의 카운팅 입력을 차단하고 (CP에 따르면 SF1 센서의 신호는 더 이상 상태를 변경할 수 없음) 트랜지스터 VT1, VT2에서 만들어진 전자 키를 열면 전기 모터 M1이 켜집니다. 로터의 8 ~ 10 회전 동안 "기어 샤프트-스러스트 링크" 어셈블리가 분리되고 급격하게 곧게 펴지는 파워 스프링이 충돌합니다. 그러나 이미 요소 DD2의 입력 12에서 이 노드(접점 쌍 SF2.1)가 분리되는 순간 "단일" 전압이 발생하여 카운터의 입력 R에서 "1"이 나타납니다. DD3. 결과적으로 카운터는 원래의 "제로"상태로 돌아가고 SA2 스위치 엔진 (제로 버스의 전위에 가까운 전압)에서 "0"이 복원되고 트랜지스터 VT1, VT2가 닫히고 전기 모터가 만들어집니다. 필요한 회전만 꺼집니다. 기계 재장전은 SA1 토글 스위치가 꺼진 상태에서 수행됩니다. 이 위치에서 단락된 SA1.1 접점 쌍은 기계의 전자 장치를 사전 실행 상태에서 "고정"합니다. 자동 장치의 지연, 즉 SA1 스위치 엔진에서 신호 2이 나타나는 것과 실제 후킹 사이의 시간은 전기 모터의 속도와 힘(강하게 강제될 수 있음), 기어박스의 감속, 귀걸이에 삽입된 샤프트 스레드 수에 따라 달라집니다. , 회전 부품의 윤활 및 물론 전원 상태. 제작된 카피에서는 0,2초를 넘지 않았다. SF1 센서의 감도는 10g/mm입니다(힘 - 낚싯줄 위, 이동 - 접촉 브래킷에서). 로커 스프링의 부드러움에 따라 다릅니다. 4볼트 전기 모터가 장착된 기계의 전원(제거되지 않은 장난감에서)은 0,5개의 갈바니 전지 또는 단기 방전 동안 1 ~ XNUMXA의 전류를 전달할 수 있는 배터리일 수 있습니다(약간의 XNUMX분의 XNUMX초) 영양이 더 높을 수 있습니다. 그러나 물론 기계 미세 회로에 허용되는 최대 값보다 높지 않습니다. 설명 된 전자 자동 장치는 러시아 과학 아카데미 극동 지부의 해양 생물학 연구소 (Popov, Reinike, Rikord 등 섬의 수역)의 해양 실험장에서 오랫동안 테스트되었습니다. ). 낚시는 주로 수심 20~25m 수심의 바닥어를 대상으로 이루어졌다. 그리고 바다 낚시의 특징 (피칭, 바람에 따른 보트의 변위, 고르지 않은 바닥, 기타 장애물)이 기계에 대해 상당히 어려운 작업을 설정했지만 실제로 경험 많은 낚시꾼보다 열등하지 않았습니다. 그리고 종종 그는 자신의 우월함을 보여주었습니다 ... 기관총은 또한 중요한 조직을 거의 손상시키지 않는 깔끔함으로 구별되었습니다. 수족관에 이식하기 위해 물고기도 잡혔기 때문에 이것은 즐거운 놀라움으로 판명되었습니다.
이 그림은 Primorye에서 채택된 장비에 가까운 기계의 일반적인 장비를 보여줍니다: 주 낚시줄 0,7 ~ 1mm, 가죽끈 - 0,5 ~ 0,6mm 길이 3 ~ 5cm, 단일 후크 No. 10. . .12. 그러나 싱커는 다릅니다. 직경이 6 ... 8이고 길이가 250mm 이상인 강철 막대입니다. 이러한 싱커와 바닥에서의 위치를 통해 눈에 띄는 흥분에도 낚싯줄의 장력을 거의 변함없이 유지할 수 있습니다. 그러나 이것은 기계 자체의 전자적 "사고"에 추가됩니다. "반 물에서"물고기를 잡는 것은 그에게 전혀 문제가되지 않았습니다. 기계의 실제 감도는 잡은 표본의 최소 무게-50 ~ 100g으로 판단할 수 있으며 물고기의 최대 무게는 리드의 강도에 의해서만 제한됩니다. 간행물: cxem.net
터치 에뮬레이션을 위한 인조 가죽
15.04.2024 펫구구 글로벌 고양이 모래
15.04.2024 배려심 많은 남자의 매력
14.04.2024
▪ 독일의 로마 말 ▪ 유전자 회춘
▪ article 왜 중국인과 베트남인 사이에 절대음이 더 많은가? 자세한 답변 ▪ 기사 컬러 음악 장치에 램프 설치. 무선 전자 및 전기 공학 백과사전 ▪ 기사 간단한 HF 미니 트랜시버. 무선 전자 및 전기 공학 백과사전
홈페이지 | 도서관 | 조항 | 사이트 맵 | 사이트 리뷰
www.diagram.com.ua |




 이 기사에 대한 의견을 남겨주세요:
이 기사에 대한 의견을 남겨주세요: