|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese|
농업용 도구 및 메커니즘
트롤리가 있는 모토블록. 도면, 설명
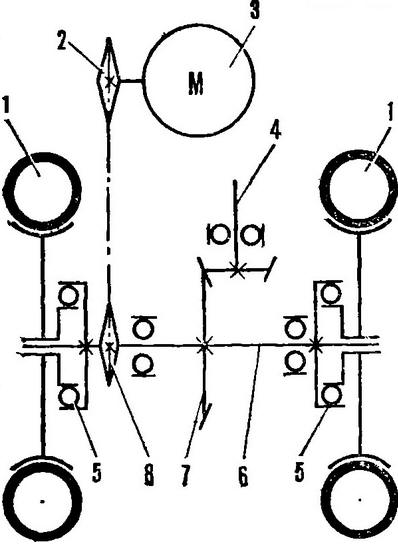
걸어 다니는 트랙터는 Chernivtsi 지역의 Kelmentsy시에서 SPTU No. 25의 "Young Technician"서클 회원들에 의해 제작되었습니다. 그것의 도움으로 감자 밭이 가공되고 잔디가 깎이고 상품이 운송됩니다. 비하인드 트랙터의 레이아웃은 프레임, 엔진 및 이륜 섀시와 같이 전통적입니다. 필요에 따라 다음과 같이 연결됩니다. 동력 인출 장치 샤프트로 구동되는 잔디 깎기 앞에서 뒤에 -지지 바퀴가있는 단일 선체 쟁기; 경운기 또는 써레의 XNUMX 개의 란셋 발 (히치를 통해); 화물 트롤리(힌지 어셈블리를 통해). 많은 유사한 기계에서와 마찬가지로 Vyatka 및 Electron 스쿠터의 구성 요소 및 어셈블리가 보행식 트랙터 및 트롤리 설계에 사용되었습니다. 이들은 VP-150M 엔진, 휠, 프레임, 스티어링 휠, 전기 장비, 시트입니다. 바퀴는 해체 된 경운기, 컨베이어 샤프트의 베벨 기어 드라이브, 커터 바 및 릴-ZhVN-6 헤더, 오버런 클러치-SZUG-3, 6 곡물 파종기, 연료 탱크-방아쇠 모터에서 가져 왔습니다. YuMZ-6 트랙터. 걸어 다니는 트랙터의 변속기는 기계식 기어 체인입니다. 10개 및 44개의 톱니가 있는 두 개의 스프로킷, 피치가 19,05mm인 체인 및 앞으로 가져온 동력인출장치 샤프트에 기어비가 1,4인 한 쌍의 베벨 기어로 구성됩니다. 보행형 트랙터의 기술 데이터
변속기의 차동 장치는 버려졌습니다. 휠 잠금 장치를 도입해야 하기 때문입니다. 첫 번째로 설계가 복잡해지고 두 번째로 작은 구획에서 기동하기가 어렵습니다. 따라서 두 개의 오버러닝 클러치가 사용되어 구동 휠이 미끄러질 수 있습니다. 보행식 트랙터의 동력 장치는 프레임입니다(그림 3). 그것은 75개의 구멍이 뚫린 40x14,2mm 코너인 크로스 멤버를 기반으로 합니다: 12,2개의 Ø 12 및 XNUMX개의 Ø XNUMXmm. 두 개의 MXNUMX 볼트가 프레임 내부에서 후자에 용접됩니다. 농기구의 부착물과 카고 트롤리의 힌지 조립체를 부착하는 데 사용됩니다.
왼쪽에는 기어 박스 하우징 아래의 수직 선반에 67x67mm 크기의 컷 아웃이있는 166x39mm 모서리 인 크로스 멤버에 캐리어 빔이 용접되어 있습니다. 앞쪽에서 빔은 주차 양각대 브래킷 지지대로 끝납니다. 오른쪽에는 200x38x8mm 크기의 캐리어 플레이트가 빔처럼 기어박스 고정용으로 설계된 크로스바에 용접되어 있습니다. 엔진 하부 프레임(그림 5)은 280x40x8mm 크기의 판으로, 중간에 76X5mm 파이프의 엔진 장착 클램프가 용접됩니다. 워크 비하인드 트랙터의 프레임에 대해 전체 엔진 아래 프레임을 움직여 구동 체인을 장력을 가하기 위해 길쭉한 구멍도 여기에 만들어졌습니다.
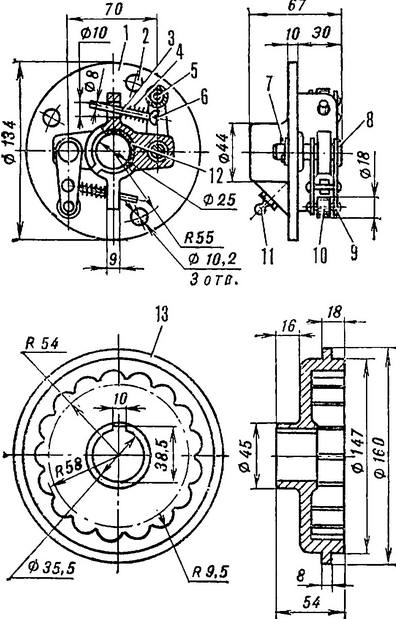
수직 막대는 판의 전면에 용접됩니다-막대 Ø 20mm 및 전면 엔진 장착 브래킷-수평 선반에 세로 구멍이있는 모서리 20x20mm로 엔진의 위치를 조정하는 데 사용됩니다. 프레임에 체인 스큐를 제거합니다. 클러치 케이블 외장 스톱을 설치하기 위해 모서리의 수직 선반에 20x6mm 컷 아웃이 만들어졌습니다. 출력 샤프트의 토크는 구동 스프로킷에 의해 체인으로 전달됩니다. 그것은 허브-Vyatka 스쿠터의 오래된 스프로킷으로 톱니가 Ø 34mm까지 연마되어 있으며 중앙 구멍이 Ø 30mm 인 4 톱니 스프로킷으로 구성됩니다. 그림 XNUMX와 같이 함께 용접됩니다. 조립할 때 걸어다니는 트랙터는 작습니다. 크기를 더 줄이기 위해 스쿠터 엔진의 표준 머플러를 수제의 더 작은 머플러로 교체했으며 (그림 13) 작업 품질면에서 공장 제품보다 결코 열등하지 않습니다. 제조를 위해 Vyatka 머플러의 일부인 벨트가 달린 파이프가 사용되었습니다. Ø 75 및 65mm 높이의 컵에 삽입하고 용접으로 링에 연결합니다. 배기 가스 배출을 위해 유리에 구멍이 뚫려 있습니다. 머플러는 엔진 실린더의 배기구에 직접 장착됩니다. 엔진은 스쿠터와 마찬가지로 킥스타터로 시동됩니다. 연료는 중력에 의해 기화기로 흐릅니다. 기어 변속은 기어박스 섹터에 용접된 레버에 의해 수행됩니다. 그러나 보행식 트랙터의 주요 제어 장치(가스 및 클러치 레버)는 화물 트롤리 부착 장치 및 스티어링 휠의 제어 노브에 표시됩니다. 보행형 트랙터 브리지는 그림 6에 나와 있습니다. 오버러닝 클러치를 설치하려면 기어박스 샤프트를 170mm(왼쪽은 100mm, 오른쪽은 70mm) 늘려야 했습니다. 이를 위해 중앙 구멍 Ø 8과 깊이 30mm를 끝 부분에 뚫고 M10 나사산을 절단했습니다. 130mm 및 100mm 길이의 막대를 나사로 조이고 샤프트에 용접하고 Ø 25mm로 가공하고 20mm 길이의 M40 나사산을 끝에서 절단했습니다. 코터 핀용 드릴 구멍 Ø 3,2 mm. 샤프트의 왼쪽 끝에는 44개의 톱니가 있는 구동 스프로킷과 왼쪽 오버러닝 클러치의 앞부분이 공통 키에 설치되었습니다(이를 위해 시트는 Ø 35,5mm로 가공되고 키홈은 밀링됨). 샤프트의 오른쪽에도 동일한 홈이 만들어졌습니다. 커플 링의 구동 부분은 변경되지 않았으며 경운기에서 휠 디스크를 부착하기 위해 세 개의 구멍 만 뚫었습니다. 물론 원하는 경우 새 구동축을 만드는 것이 가능하며 그림 7에 나와 있습니다. 오버러닝 클러치(그림 8)는 다음과 같이 작동합니다. 샤프트가 회전할 때 셀이 있는 선행 부분이 구동 롤러에 기대어 회전하게 합니다. 비하인드 트랙터를 돌릴 때 더 큰 반경의 원으로 움직이는 휠은 샤프트보다 빠르게 회전하고 클러치의 앞부분은 각각 구동되는 것보다 빠르게 회전합니다. 따라서 스프링을 압축하는 롤러가 세포 표면 위로 미끄러집니다(부드러운 딸깍 소리가 들림). 휠의 회전 속도가 감소하면 롤러가 셀과 다시 맞물립니다. 나일론 부싱은 각 오버런 클러치의 구동 부품 내부 공동으로 압입됩니다. "러닝 샤프트-슬리브" 인터페이스는 오일러를 통해 그리스로 윤활됩니다. 부착물(그림 9)에는 경운기 유닛이 사용되었습니다. 트윈 로드가 짧아지고 도킹 채널에 용접됩니다. 보행형 트랙터에 부착하기 위한 세로 방향 구멍도 있습니다.
타이 로드는 랙용 구멍과 잠금 나사가 있는 농기구의 브래킷 홀더로 끝납니다. 제어 핸들의 파이프는 위에서 채널에 용접됩니다. 가스 및 클러치 레버가있는 스티어링 휠을 설치하기 위해 끝이 평평하고 구멍이 뚫려 있습니다. 힌지 어셈블리(그림 12)는 스쿠터의 스티어링 샤프트로 만들어집니다. 샤프트는 460mm로 짧아지고 자동차 드라이브 라인 조인트의 요크가 아래에서 용접됩니다. 짝짓기 포크를 제거하고 135mm 길이의 플레이트를 얹고 십자가 끝에 용접했습니다. 플레이트의 하단은 경사지고 채널에 용접됩니다. 후자의 경우 트롤리를 보행형 트랙터의 프레임에 부착하기 위한 세로 구멍도 만들어졌습니다. 경첩 어셈블리는 오일러를 통해 윤활 처리됩니다. 트롤리 프레임(그림 11)의 중심에는 Vyatka 또는 Electron 스쿠터의 프레임이 있습니다. 아래에서 35x35mm 길이 870mm의 두 모서리가 용접됩니다. 후면 자유 단은 500mm 길이의 세 번째 모서리로 연결됩니다. 또한 Vyatka의 전면 서스펜션에는 수평 35인치 파이프로 연결된 두 개의 포크(휠 브레이크 드럼 본체의 스톱이 오른쪽에 용접됨)가 있습니다. 35xXNUMXmm 모서리로 만들어진 U자형 서브프레임도 스쿠터의 메인 프레임에 용접됩니다. 본체 설치를 위해 수평배관에 힌지 부싱 XNUMX개를 부착한다. 잠금 레버, 작은 구멍, 스프링 및 가이드 슬리브와 같은 간단한 본체 잠금 장치가 서브 프레임의 가로 모서리에 설치됩니다. 잠금 레버 핸들에서 190mm 떨어진 곳에 Ø 2,5mm 구멍을 뚫고 스프링이 맞닿는 코터 핀을 삽입했습니다. 작업 위치에서 팁이 있는 래치가 본체 마운팅의 전면 루프에 들어가 고정됩니다. 대차 본체의 프레임(그림 10)은 20x20mm 모서리로 만들어지고 1,5mm 두께의 강판으로 덮여 있습니다. 본체를 운송 위치에 고정하기 위한 루프가 전면에 용접되고 측면에는 손가락이 삽입되는 힌지 부싱과 연결하기 위한 루프가 있습니다-강철 막대 Ø 17mm. 결론적으로 보행식 트랙터를 조작하기가 쉽다는 말은 남아 있습니다. 예를 들어 우리 서클의 구성원은 한 수업에서 마스터링합니다. 걸어 다니는 트랙터는 물건을 운반하는데도 편리합니다. 운전자는 단축되고 회전 된 180 ° 좌석 (그 아래에 도구 상자가 있음)에 앉아 스티어링 휠에 남아있는 표준 핸들을 잡고 보행 형 트랙터를 제어합니다. 저자: V.Nikityuk
▪ 전동 드릴 모어 ▪ 디스크 경운기 ▪ 수동 이식 기계
정원의 꽃을 솎아내는 기계
02.05.2024 고급 적외선 현미경
02.05.2024 곤충용 에어트랩
01.05.2024
▪ 수성의 얼음
▪ 기사 테세우스의 아버지는 누구였습니까? 자세한 답변 ▪ 기사 오실로스코프 화면의 확성기 특성. 무선 전자 및 전기 공학 백과사전
홈페이지 | 도서관 | 조항 | 사이트 맵 | 사이트 리뷰
www.diagram.com.ua |













 다른 기사 보기 섹션
다른 기사 보기 섹션 